Formelsammlung
| Umfangskraft | Fu | [N] | Hubkraft | FH | [N] | |
| Drehmoment | M | [Nm] | Riemenlänge | LB | [mm] | |
| Leistung | P | [W] | Trumlänge | L1, L2 | [mm] | |
| Zu bewegende Masse | m | [kg] | Riemenzähnezahl | zB | ||
| Masse Linearschlitten | mL | [kg] | Scheibenzähnezahl | z | ||
| Masse Zahnriemen | mB | [kg] | Eingriffzähnezahl | ze | ||
| Masse Zahnscheibe | mZ | [kg] | Wirkkreisdurchmesser | d0 | [mm] | |
| Masse Spannrolle | mS | [kg] | Kopfkreisdurchmesser | dK | [mm] | |
| reduzierte Masse | mred | [kg] | Durchmesser Spannrolle | ds | [mm] | |
| spezifisches Gewicht | ρ | [kg/dm3] | Bohrung | d | [mm] | |
| Beschleunigung | a | [m/s2] | Riemenbreite | b | [mm] | |
| Erdbeschleunigung | g | [m/s2] | Vorspannweg | Δl | [mm] | |
| Geschwindigkeit | v | [m/s] | spez. Federrate | cspez | [N] | |
| Drehzahl | n | [min-1] | Federrate | c | [N/mm] | |
| Winkelgeschwindigkeit | ω | [s-1] | ||||
| Achsabstand | sA | Positionierabweichung | Δs | [mm] | ||
| Nutzbare Linearstrecke | sL | Positionierstreubreite | Ps | [mm] | ||
| gesamter Verfahrweg | sges | |||||
| spezifische Zahnkraft | Ftspez | [N] | Beschleunigungsweg | sB | [mm] | |
| zulässige Seilzugkraft | FTzul | [N] | Bremsweg | s'B | [mm] | |
| Vorspannkraft | FTV | [N] | Eigenfrequenz | fe | [s-1] | |
| max. Trumkraft | FTmax | [N] | Erregerfrequenz | f0 | [s-1] | |
| Achslast | FA | [N] | Fahrzeit bei v=konst. | tv | [s] | |
| Wellenkraft | Fw | [N] | Gesamtzeit | tges | [s] | |
| Reibkraft | FR | [N] | Gesamtstrecke | sges | [mm] |
Alle Gleichungen sind mit den hier genannten Dimensionen anzuwenden.
Berechnung
\[F_U={2 \cdot 10^3\cdot M \over d_0}\]
Umfangskraft
\[M={d_0 \cdot F_U \over 2 \cdot 10^3}\]
Drehmoment
\[P={M \cdot n \over 9,55 \cdot 10^3}\]
Leistung
Berechnungsgröße
Umfangskraft FU [N]
Drehmoment M [Nm]
Leistung P [kW]
Durchmesser d0 [mm]
\[\omega={\pi \cdot n \over 30}\]
Winkelgeschwindigkeit
\[n={19,1 \cdot 10^3 \cdot v \over d_0}\]
Drehzahl
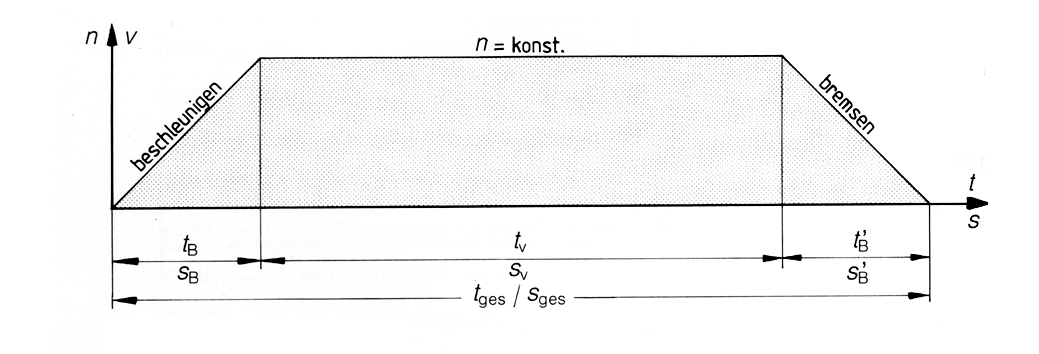
\[v={d_0 \cdot n \over 19,1 \cdot 10^3}={\sqrt {2 \cdot s_B \cdot a \over 1000}}\]
Geschwindigkeit / Umfangs-geschwindigkeit
\[t_B={v \over a}={\sqrt {2 \cdot s_B \over a \cdot1000}}\]
Beschleunigungszeit (Bremszeit)
\[s_B={a \cdot t_B^2 \cdot 10^3 \over 2}={v^2 \cdot 10^3 \over 2 \cdot a}\]
Beschleunigungsweg (Bremsweg)
\[t_v={s_v \over v \cdot 10^3}\]
Verfahrzeit bei v = konst.
\[s_v={v \cdot t_v \cdot 10^3}\]
Verfahrstrecke bei v = konst.
\[t_{ges}={t_B + t_v +t_B}\]
Gesamtzeit
\[s_{ges}={s_B + s_v +s_B}\]
Gesamtstrecke
FU = Beschleunigungskraft (1.) + Hubkraft (2.) + Reibkraft (3.)
= m * a + m * g + m * µ
erforderliche Umfangskraft an der Antriebsscheibe FU [N]
- Die Beschleunigungskraft FB ist aufzubringen, wenn der Linearantrieb mit der Masse m z. B. aus der Ruhelage auf Endgeschwindigkeit v zu beschleunigen ist.
- Die Hubkraft FH ist aufzubringen, wenn die Bewegungsrichtung entgegengesetzt zur Erdbeschleunigung gerichtet ist. Bei horizontaler Linearbewegung ist FH = 0.
- Eine Reibkraft ist aufzubringen, wenn entgegengesetzt zur Bewegungsrichtung eine Kraft wirkt, z.B. Reibungskraft. Sind die Reibungswiderstände zu vernachlässigen, so ist FR = 0.
Berechnung
mL [kg] Masse des zu bewegenden Linearschlittens
mB [kg] Masse des Zahnriemens (Riemengewichte siehe Technische Daten)
mZred [kg] reduzierte Masse der Zahnscheibe(n)
mSred [kg] reduzierte Masse der Spannrolle(n)
Berechnungsgröße
zu bewegende Masse m [kg]
m = mL + mB + mZred + mSre
Die Masse einer Zahnscheibe bzw. einer Spannrolle berechnet sich zu:
\[m_Z={(d_K^2-d^2) \cdot \pi \cdot B \cdot \rho \over 4 \cdot 10^6}\]
\[m_S={(d_S^2-d^2) \cdot \pi \cdot B \cdot \rho \over 4 \cdot 10^6}\]
Masse der Zahnscheibe mZ [kg]
Masse der Spannrolle mS [kg]
Die reduzierte Masse mred einer Zahnscheibe bzw. einer Spannrolle ist eine Ersatzmasse mit gleicher Massenträgheit zur Wirklinie des Zahnriemens wie der Rotationskörper zur Rotationsachse.
\[m_{Zred}={m_Z \over 2 }{[1+{d^2 \over d_K^2}]}\]
\[m_{Sred}={m_S \over 2 }{[1+{d^2 \over d_S^2}]}\]
red. Masse der Zahnscheibe mZred [kg]
red. Masse der Spannrolle mSred [kg]
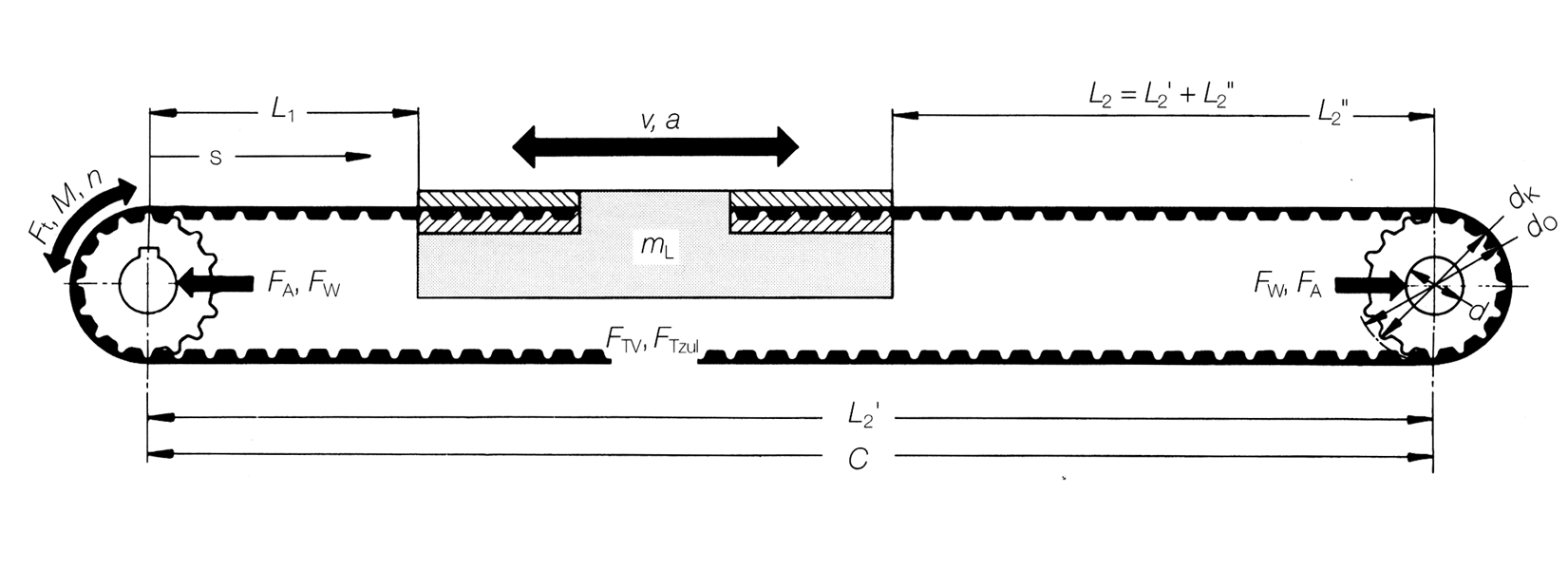
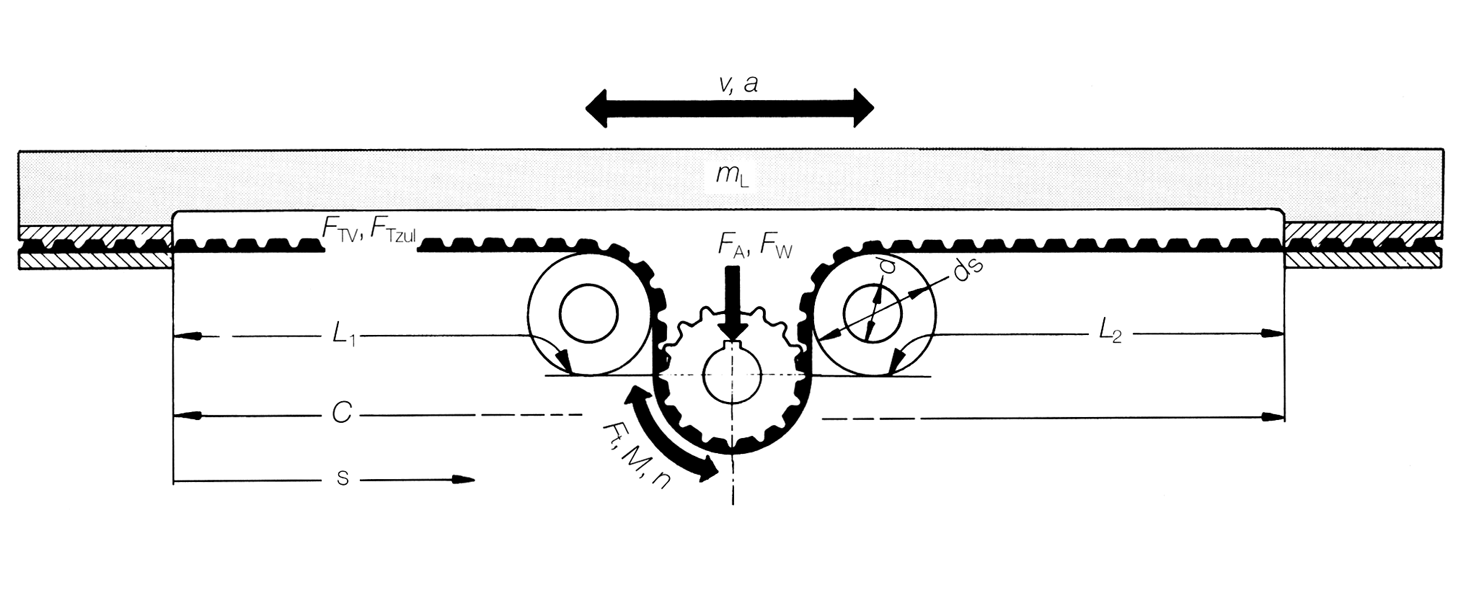
Ein Linearantrieb ist richtig vorgespannt, wenn unter wirkender maximaler Umfangskraft FUmax (aus Beschleunigung und Bremsen) der Leertrum des Riemens gestreckt bleibt. Es ist eine Mindestvorspannkraft vorzusehen von:
FV ≥ FU
Vorspannkraft FV [N]
Die größten Trumkräfte Fmax sind im Zugtrum zu erwarten, wenn Vorspannkraft FV (statisch) und Verkehrskraft FU (dynamisch) gemeinsam wirksam werden.
Fmax = FV + FU
maximale Trumkraft im Riemen Fmax [N]
Die zulässige Seilzugkraft FTzul muß stets Sicherheiten aufweisen gegenüber der max. auftretenden Trumkraft Fmax im Zahnriemen.
(FTzul siehe Technische Daten).
FTzul ≥ Fmax
zulässige Trumkraft FTzul [N]
Die statische Achskraft FAsta wirkt im Stillstand oder unter Leerlaufbedingungen.
FAdyn ist eine von der wirksamen Umfangskraft abhängige Größe.
FAstat = 2 * FV
Achskraft [N]
Berechnung
\begin{align}
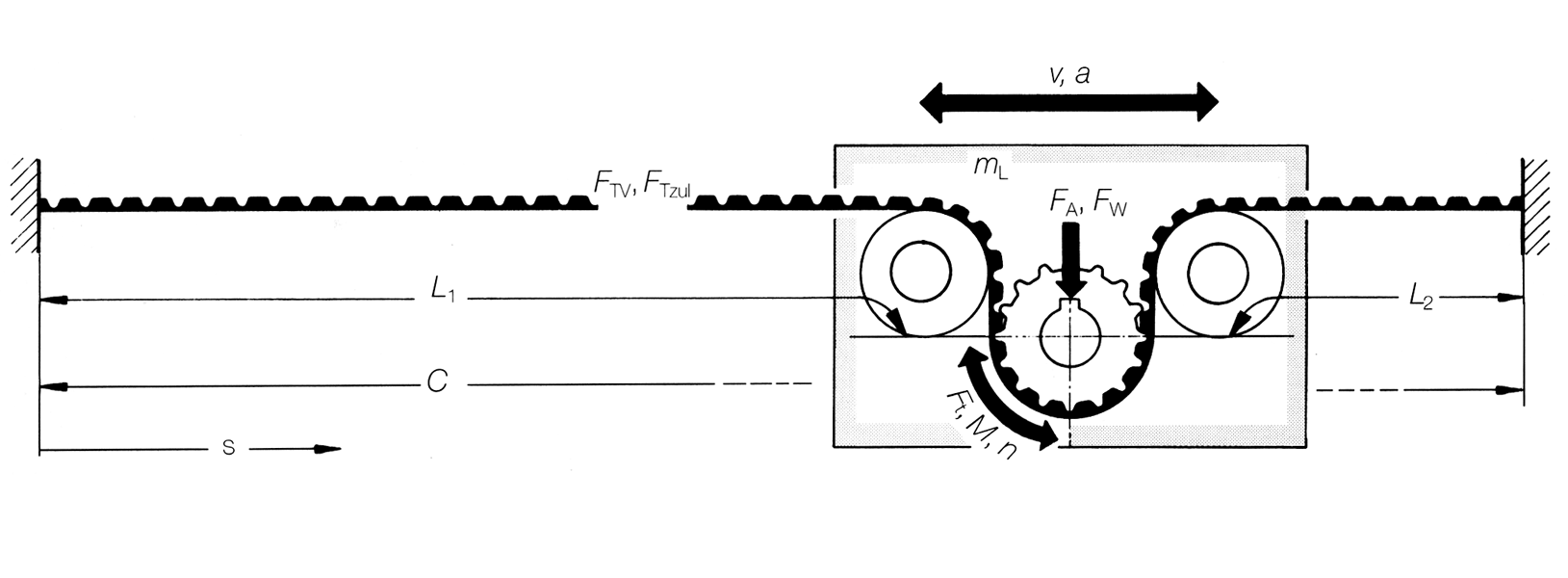
\Delta l&={F_V \cdot L_B \over 2 \cdot c_{spez}}&& \text{Linear-Schlitten}\\
\Delta l&={F_V \cdot L_B \over c_{spez}}&& \text{Linear-Laufkatze}\\
\Delta l&={F_V \cdot L_B \over c_{spez}}&& \text{Linear-Tisch}
\end{align}
Berechnungsgröße
Vorspannweg Δl [mm]
Die Spannstation kann an beliebiger Stelle des Zahnriemens angeordnet werden.
Werte für cspez siehe Technische Daten.
\[c={{L_B \over L_1 \cdot L_2}\cdot c_{spez}}\]
Federrate c [N/mm]
\[L_B={L_1 + L_2}\]
Linearsysteme weisen eine veränderliche Federrate auf. Das Federungsverhalten des Linearschlittens bzw. Lineartisches ist abhängig vom jeweiligen Längenverhältnis L1 und L2.
Das heißt: Jede Position des Lineartisches hat seine eigene Federrate.
Die Federrate weist ein Minimum cmin auf, wenn L1 und L2 längengleich sind. Für diesen Fall gilt die Beziehung:
\[c_{min}={4 \cdot c_{spez} \over L_B}\]
bei L1=L2
Wirkt eine äußere Kraft auf einen Linearschlitten, so ergibt sich die Positionierabweichung s aus der Beziehung:
\[\Delta s={F \over c}\]
Positionierabweichung Δs [mm]
Eine am Zahnriemen verbundene Masse (Feder-Masse-System) gerät bei einem Kraftanstoß in gedämpfte Eigenschwingung.
\[f_e={{1 \over 2\pi}\sqrt{c \cdot 1000 \over m_L}}\]
Eigenfrequenz fe [s-1]
Lineartriebe müssen gegebenenfalls überprüft werden, ob im Antriebssystem Erregefrequenzen f0 auftreten, die in der Nähe der Eigenfrequenz fe liegen.
Bei technischen Konstruktionen ist die Übereinstimmung fe = f0< (Resonanz) zu vermeiden.
Hinweis: In Lineartrieben liegt die Eigenfrequenz fe im Allgemeinen deutlich höher als die Erregerfrequenz f0 des Antriebes, Resonanz ist dann nicht zu erwarten. Eine besondere Prüfung wird gegebenenfalls beim Einsatz von Schrittmotoren empfohlen. Maßnahmen bei Resonanz: Federsteife des Zahnriemens erhöhen durch größere Riemenbreite.
Vorgehensweise
Mit den vorgenannten Gleichungen können BRECO-Linearantriebe umfassend berechnet werden. Es hängt von der Art der Aufgabenstellung ab, welche Untersuchungen im Einzelnen erforderlich sind. Gegebenenfalls ist die technische Beratung durch unsere Vertriebspartner anzufordern.
Allgemeine Kinematik
Wenn der Bewegungsablauf des Lineartriebes zeitlich zu optimieren ist, empfehlen wir, nach den linearen Bewegungsgrößen der Gleichungen (3) vorzugehen.
Grobauslegung nach Masse und Beschleunigung
In der Regel sind die Masse des Linearschlittens mL und die Beschleunigung a die bestimmenden Größen für die Antriebsauslegung von Lineartrieben. Auf der Seite Bestimmung von Riementyp und Riemenbreite kann nach dem Auswahl-Diagramm Riementyp und Zahnriemenbreite aus Masse und Beschleunigung ermittelt werden.
Im Zusammenhang der Grobauslegung ist es zweckmäßig, die Zahnscheibenabmessungen (vorläufig) anzunehmen. Es sind die zulässigen Mindestzähnezahlen bzw. Mindestdurchmesser zu beachten.
Die Antriebsstation
Die erforderliche Umfangskraft FU in der Antriebsstation ist nach Gleichung (4) zu ermitteln. Mit der vorläufigen Annahme der Zahnscheibengröße kann für die Antriebsstation das zugehörige Antriebs-Drehmoment M nach Gleichung (2) berechnet werden. Es hängt von der Art und Wahl des Antriebsmotors ab, inwieweit das berechnete Drehmoment M mit dem Drehmomentverlauf des Motors in Einklang gebracht werden kann. Die Wahl des Motors hängt auch von den gewünschten Stell- und Positionieraufgaben ab. Nach der Festlegung des Antriebsmotors ist als Berechnungsgrundlage zur weiteren Genauauslegung des Zahnriemens der tatsächliche Drehmomentverlauf des Motors heranzuziehen.